本章主要介绍了POSIX线程, 也就是pthread。一个进程可以包含多个线程,线程之间共享全局内存。
线程的缺点:
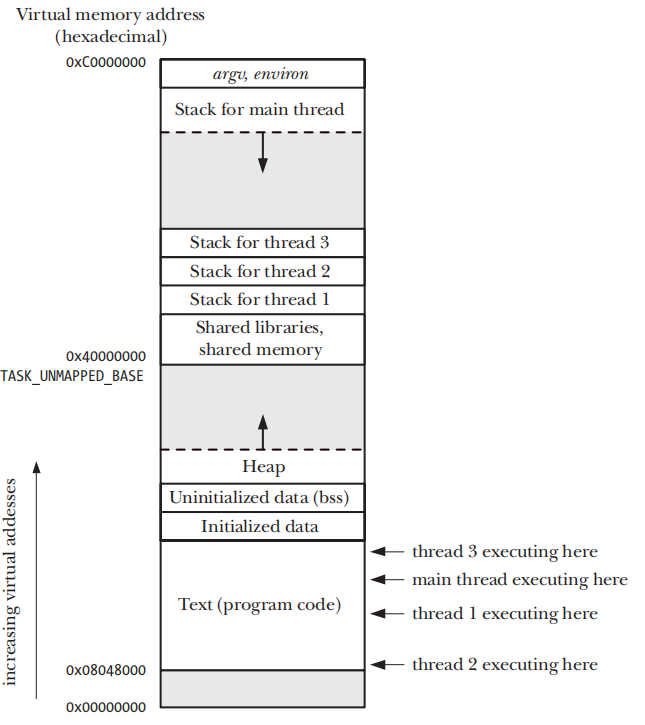
多线程编程时,需要考虑线程安全。 某个线程存在BUG,可能危及该进程的所有线程。 每个线程争用宿主进程的有限的虚拟地址空间。 多线程中处理信号需要特别小心 除了数据,还可以共享文件描述符、信号处理、当前工作目录、以及用户ID和组ID,优劣视应用而定。 线程在进程中执行时的内存布局如下图:
线程在进程内运行时内存布局 线程之间共享的信息:
进程ID和父进程ID 进程组ID和会话ID 控制终端 用户和组ID 文件描述符 使用fcntl()创建的record locks 信号配置 文件系统相关信息:umask,当前工作目录,根目录 间隔计时器 (setitimer())和POSIX计时器 (timer_create()) System V信号量 资源限制 CPU 时间消耗(times()) 资源消耗(getrusage()) nice值 线程之间不共享的属性:
线程id 信号mask 线程相关的数据 备用信号栈 errno 变量 浮点数环境(fenv(3)) 实时调度策略和优先级 CPU affinity capabilities 栈 创建线程 1
2
3
4
5
#include <pthread.h>
int pthread_create ( pthread_t * thread , const pthread_attr_t * attr , void * ( * start )( void * ), void * arg );
// Return 0 on success, or a positive error number on error
新线程从函数start以参数arg开始执行,参数thread指向的缓冲区,在此保存一个该进程的唯一标识, 供后续使用。start函数的返回值不应指定在线程栈中,因为线程终止后无法确定线程栈的内容是否有效。
终止进程 1
2
3
#include <pthread.h>
void pthread_exit ( void * retval );
相当于在start函数内return。retval指定了线程返回值,举个使用的栗子:
1
2
3
4
5
6
7
8
9
10
void * thread ( void * arg ) {
char * ret ;
if (( ret = ( char * ) malloc ( 20 )) == NULL ) {
perror ( "malloc() error" );
exit ( 2 );
}
strcpy ( ret , "This is a test" );
pthread_exit ( ret );
}
pthread_join() 函数thread_join()等待由thread标识的线程终止(若已经终止会立即返回)
1
2
3
4
5
#include <pthread.h>
int pthread_join ( pthread_t thread , void ** retval );
// Return 0 on sucess, or a positive error number on error
若线程未分离(detached),而又没有使用pthread_join(),那么线程终止后将产生僵尸线程。
一个进程内的线程之间的关系是对等的,进程中的任意线程都可以调用pthread_join()与该进程的任何其他线程连接起来。 pthread_join()无法连接任意线程,必须指定特定的线程ID。也不能以非阻塞方式连接。 线程的分离 如果不关心进程的返回状态,只希望进程在线程终止的时候能自动清理并移除之,可以使用pthread_detach()
1
2
3
4
5
#include <pthread.h>
int pthread_detach ( pthread_t thread );
// Return 0 on sucess, or a positive error number on error
但是当其他线程调用了exit(), 或主进程执行return时,即使分离的线程也会收到影响,进程的所有线程将会立即停止。
线程的同步 因为线程之间能够共享全局变量,所以就存在竞争问题,为了安全的共享变量,不同线程之间需要同步操作。
互斥量 互斥量pthread_mutex_t使用前必须初始化
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
#include <pthrad.h>
// 静态互斥量的初始化
static pthread_mutex_t mtx = PTHREAD_MUTEX_INITIALIZER ;
// 动态互斥量的初始化
int func () {
pthread_mutex_t mtx ;
pthread_mutexattr_t mtxAttr ;
int s , type ;
s = pthread_mutexattr_init ( & mtxAttr );
if ( s != 0 )
return ;
// 设置属性
s = pthread_mutexattr_settype ( & mtxAttr , PTHREAD_MUTEX_ERRORCHECK );
if ( s ! = 0 )
return ;
s = pthread_mutex_init ( mtx , & mtxAttr );
pthread_mutex_init ( mtx , );
}
对互斥量加锁和解锁
1
2
3
4
5
6
7
#include <pthrad.h>
int pthread_mutex_lock ( pthread_mutex_t * mutex );
int pthread_mutex_unlock ( pthread_mutex_t * mutex );
// Return 0 on success, or a positive error number on error
如果互斥量之前未锁定,执行锁定操作将会立即返回,否则将会一直阻塞到互斥量被解锁。
当不再需要互斥量时,应使用pthread_mutex_destory()将其销毁。
1
2
3
4
5
#include <pthread.h>
int pthread_mutex_destory ( pthread_mutex_t * mutex );
// Return 0 on success, or a positive error number on error
互斥量的属性之一 类型:
PTHREAD_MUTEX_NORMAL: 该互斥量不具有死锁自检功能,对与已经锁住的互斥量,再次加锁会导致不确定结果。(linux下会成功) PTHREAD_MUTEX_ERRORCHECK: 会对加解锁过程做检查。 PTHREAD_MUTEX_RECURSIVE: 递归维护一个锁计数器,每次加锁会+1,每次解锁会-1,当计数为0时才会释放该互斥量。解锁时和上一个类型一样,若互斥量处于未锁定状态或已由其他线程锁定, 操作都会失败。 条件变量 条件变量可以在共享变量状态改变的时候通知其他线程,其他线程可以等待通知。
条件变量初始化
1
2
3
4
5
6
7
8
9
#include <pthread.h>
// 静态条件变量初始化
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER ;
// 动态条件变量初始化
int pthread_cond_init ( pthread_cond_t * cond , const pthread_condattr_t * attr );
// Returns 0 on success, or a positive error number on error
通知和等待条件变量操作
1
2
3
4
5
6
7
#include <pthread.h>
int pthread_cond_signal ( pthread_cond_t * cond );
int pthread_cond_broadcast ( pthread_cond_t * cond );
int pthread_cond_wait ( pthread_cond_t * cond , pthread_mutex_t * mutex );
int pthread_cond_timedwait ( pthread_cond_t * cond , pthread_mutex_t * mutex ,
const struct timespec * abstime );
// All return 0 on success, or a positive error number on error
pthread_cond_signal()和pthread_cond_broadcast()区别在于前者只保证通知至少一个阻塞在pthread_cond_wait()的线程,后者会通知所有阻塞的线程。除非只有一个阻塞线程需要唤醒,比如所有线程都执行同一操作,只需要唤醒一个线程做就行。使用pthread_cond_broadcast()一般会得到正确结果。pthread_cond_signal()通知的时候若没有线程在等待,就会被忽略。
从pthread_cond_wait()的参数就能看出,它需要和mutex配合使用,在其内部对mutex会按顺序做如下操作:
释放mutex; 阻塞当前调用线程,直到其他线程通知条件变量改变 再次获取mutex pthread_cond_wait()传入的mutex就是用于控制共享变量访问时用到的mutex, 为什么需要这个mutex呢? 这个mutex就是为了保护共享变量的,这个共享变量的作用类似“状态(state)”或“标志(flag)”,比如下面这段程序中的avail。在检查或修改共享变量之前都需要拥有mutex。这样设计的原因是因为条件变量和互斥量之间存在着天然的关系:
线程在准备检查共享变量状态时锁定互斥量。 检查共享变量状态 如果共享变量未处于预期状态,线程应在等待条件变量并进入休眠前解锁互斥量(以便其他线程能访问该共享变量) 当线程因为条件变量的通知而被再度唤醒时,必须对互斥量再次加锁,因为在典型情况下,线程会立即访问共享变量。 pthread_cond_wait()会自动执行最后两步中对互斥量的解锁和加锁动作,并且第3步的互斥量释放和陷入休眠属于一个原子操作。在这个地方一开始我还存在困扰,我想如果在生产者发条件变量信号之后,消费者才陷入等待,岂不是会丢掉信号。其实我看错了,因为消费者陷入等待之前会首先判断共享变量也就是状态是否满足,不满足要求才会陷入等待。而前述情况既然发了条件变量信号,就说明avail已经++了,是不会等待的。所以是我之前看的太局部,没有考虑到条件变量是为线程间访问临界资源服务的。
使用while()而不是if()来检查判断条件是因为从pthread_cond_wait()返回后需要重新检查判断条件,这是因为:
其他线程可能会率先醒来,改变了判断条件的状态。 条件变量信号意味着“可能有事情去做”,而不是“一定有事情去做”,接收信号的线程可以通过再次检查条件来确定是否真的需要做什么。 可能出现虚假唤醒的情况 1
2
3
4
5
6
7
8
9
10
11
12
13
static pthread_mutex_t mtx = PTHREAD_MUTEX_INITIALIZER ;
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER ;
static int avail = 0 ;
// 生产者
pthread_mutex_lock ( & mtx );
avail ++ ;
pthread_mutex_unlock ( & mtx );
pthread_cond_signal ( & cond );
1
2
3
4
5
6
7
8
9
10
11
12
13
// 消费者
pthread_mutex_lock ( & mtx );
while ( avail == 0 ) { /* Wait for something to consume */
pthread_cond_wait ( & cond , & mtx );
}
while ( avail > 0 ) { /* Consume all available units */
/* Do something with produced unit */
avail -- ;
}
pthread_mutex_unlock ( & mtx );
线程安全 一个线程安全的函数允许同时被多个线程调用,若一个函数中使用了全局变量,通常需要互斥量来同步以保证线程安全。不用互斥量就可以被多线程安全调用的函数称为可重入函数,可重入函数中不会用到全局和静态变量。
One-time 初始化 有时候,可能有一个函数会被每一个线程调用,但只希望第一次调用的时候执行。
1
2
3
4
5
6
7
#include <pthread.h>
pthread_once_t once_control = PTHREAD_ONCE_INIT ;
int pthread_once ( pthread_once_t * once_control , void ( * init )( void ));
// return 0 on success, or a positive error number on error
使用栗子:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
#include <stdio.h>
#include <errno.h>
#include <pthread.h>
#define threads 3
int once_counter = 0 ;
pthread_once_t once_control = PTHREAD_ONCE_INIT ;
void once_fn ( void )
{
puts ( "in once_fn" );
once_counter ++ ;
}
void * threadfunc ( void * parm )
{
int status ;
int threadnum ;
int * tnum ;
tnum = parm ;
threadnum = * tnum ;
printf ( "Thread %d executing \n " , threadnum );
status = pthread_once ( & once_control , once_fn );
if ( status < 0 )
printf ( "pthread_once failed, thread %d, errno=%d \n " , threadnum ,
errno );
pthread_exit (( void * ) 0 );
}
main () {
int status ;
int i ;
int threadparm [ threads ];
pthread_t threadid [ threads ];
int thread_stat [ threads ];
for ( i = 0 ; i < threads ; i ++ ) {
threadparm [ i ] = i + 1 ;
status = pthread_create ( & threadid [ i ],
NULL ,
threadfunc ,
( void * ) & threadparm [ i ]);
if ( status < 0 ) {
printf ( "pthread_create failed, errno=%d" , errno );
exit ( 2 );
}
}
for ( i = 0 ; i < threads ; i ++ ) {
status = pthread_join ( threadid [ i ], ( void * ) & thread_stat [ i ]);
if ( status < 0 )
printf ( "pthread_join failed, thread %d, errno=%d \n " , i + 1 , errno );
if ( thread_stat [ i ] != 0 )
printf ( "bad thread status, thread %d, status=%d \n " , i + 1 ,
thread_stat [ i ]);
}
if ( once_counter != 1 )
printf ( "once_fn did not get control once, counter=%d" , once_counter );
exit ( 0 );
}
1
2
3
4
5
6
执行结果:
Thread 1 executing
in once_fn
Thread 2 executing
Thread 3 executing
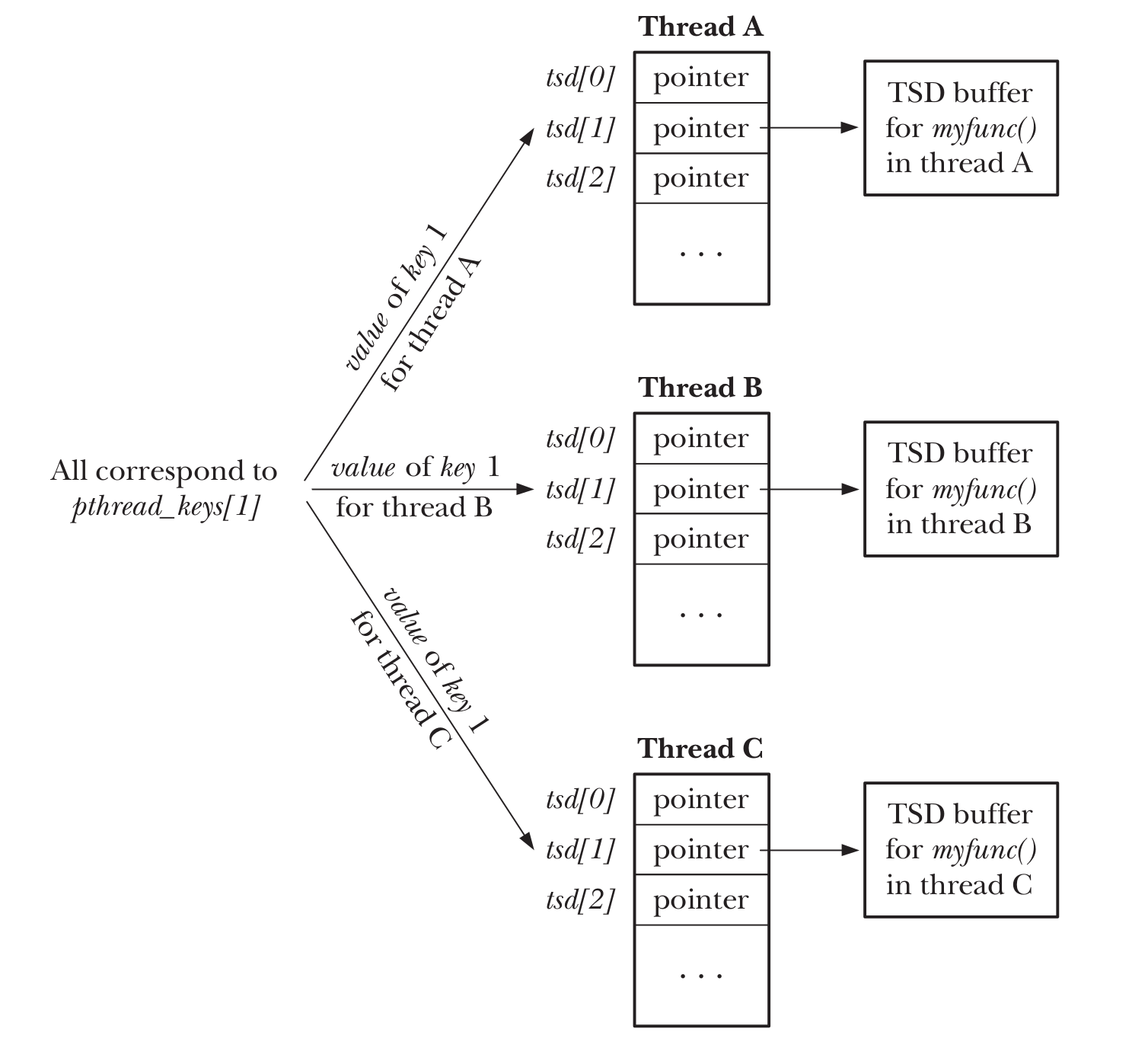
线程特有数据 线程特有数据允许每个调用函数的线程持有一份变量的拷贝。
为了区分不同函数之间的线程特有数据,需要创建一个key来区分它们。记住,这个key是用来区分函数的,而不是线程的。
1
2
3
#include <pthread.h>
int pthread_key_create ( pthread_key_t * key , void ( * destructor )( void * ));
// Returns 0 on success, or a positive error number on error
也正是因为key是用来区分函数的,所以返回的key可以被进程中的所有线程使用,指向的是一个由我们事先声明的全局变量。
1
2
3
4
5
6
#include <pthread.h>
int pthread_setspecific ( pthread_key_t key , const void * value );
// return 0 on success, or a positive error number on error
void * pthread_getspecific ( pthread_key_t key );
// return pointer, or a NULL if no thread-specific data is associated with key
pthread_setspecific()的参数key是调用pthread_key_create()分配的key,value通常指向一块由调用者分配的内存,线程终止时,会自动调用create时指定的destructor()去释放value指向的内存。
线程特有数据的实现结构 其实根据上面这个图,之前对key的总结有点补充,key是用来区分函数的,但并不代表一个函数内只能用一个key,一个函数中可以创建和指定多个key。但上限有限,linux中key最多可以1024个。通常只用一个key就可以了,将函数要用的多个特有数据值放到一个结构中。
线程局部存储(thread-local Storage) 线程局部存储比线程特有数据使用起来更加简单,只要在声明全局或静态变量的时候加上__thread说明符,每个线程就会持有一份此变量的拷贝:
1
static __thread buf [ MAX_ERROR_LEN ];
线程取消 调用下面系统调用可以请求取消掉指定线程(在其他线程中调用)。
1
2
3
#include <pthread.h>
int pthread_cancel ( pthread_t thread );
// Returns 0 on success, or a positive error number on error
线程取消状态 调用如下接口,可以控制本线程对取消请求的应对方式。
1
2
3
4
#include <pthread.h>
int pthread_setcancelstate ( int state , int * oldstate );
int pthread_setcanceltype ( int type , int * oldtype );
// Both return 0 on success, or a positive error number on error
pthread_setcancelstate()参数state可选状态如下:
PTHREAD_CANCEL_DISABLE: 线程不可取消,取消状态被挂起,直到状态改为enable PTHREAD_CANCEL_ENABLE: 线程可取消 如果线程是可取消的,那线程取消的请求结果由可取消类型决定
PTHREAD_CANCEL_ASYNCHRONOUS:线程可以在任何时间被取消(不一定是马上被取消)。 PTHREAD_CANCEL_DEFERRED:请求被挂起,直到下一个取消点。 取消点 仅当取消操作安全时才应取消线程。pthreads 标准指定了几个取消点,其中包括:
通过 pthread_testcancel 调用以编程方式建立线程取消点。如果当前有一个取消请求在等待,线程就会取消。 线程等待 pthread_cond_wait 或 pthread_cond_timedwait(3C) 中的特定条件出现。 线程在 pthread_join()等待其他线程结束。 被 sigwait(2) 阻塞的线程。 一些标准的库调用。通常这些调用可使其线程阻塞。有关列表,请参见 cancellation(5) 手册页。 线程取消的危险性主要与未释放共享资源有关,取消时须十分注意,否则可能导致死锁。为了避免这些,取消点因此选在线程阻塞的时候,减小持有资源的可能,除此之外还可以使用cleanup handler
cleanup handlers 1
2
3
#include <pthread.h>
void pthread_cleanup_push ( void ( * routine )( void * ), void * arg );
void pthread_cleanup_pop ( int execute );
清理函数是以栈的形式来管理的,这两个函数很明显用来添加和删除handler,每个push都应该有一个对应的pop。当线程执行到最后退出的话,是不需要调用清理函数的,所以要在适当的时候将handler从栈中pop出来。若pthread_cleanup_pop()参数execute不为0,弹出的栈顶处理函数的同时会执行清理函数。线程因调用pthread_exit()终止的时候,会自动执行尚未从清理函数栈中弹出的清理函数,线程正常返回(return)时不会执行s清理函数。
异步取消 如果设定线程可异步取消时,可以在任何时点将其取消,取消动作不会拖延到下一个取消点才执行。异步取消时虽然清理函数可以执行,但是无法得知线程当前执行到哪一步。所以原则上可异步取消的线程不应该分配资源。
线程细节 栈 每个线程有自己的固定大小的栈,以下函数可以修改:
1
2
3
4
5
#include <pthread.h>
// 可以更改栈大小
int pthread_attr_setstacksize ( pthread_attr_t * attr , size_t stacksize );
// 可以更该栈地址和栈大小
int pthread_attr_setstack ( pthread_attr_t * attr , void * stackaddr , size_t stacksize );
使用栗子如下,可见上面两个函数是将栈size或地址写到属性中,在创建线程的时候再使用指定属性创建线程。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
#include <stdio.h>
#include <pthread.h>
void * thread1 ( void * arg )
{
printf ( "hello from the thread \n " );
pthread_exit ( NULL );
}
int main ()
{
int rc , stat ;
size_t s1 ;
pthread_attr_t attr ;
pthread_t thid ;
rc = pthread_attr_init ( & attr );
if ( rc == - 1 ) {
perror ( "error in pthread_attr_init" );
exit ( 1 );
}
s1 = 4096 ;
rc = pthread_attr_setstacksize ( & attr , s1 );
if ( rc == - 1 ) {
perror ( "error in pthread_attr_setstacksize" );
exit ( 2 );
}
rc = pthread_create ( & thid , & attr , thread1 , NULL );
if ( rc == - 1 ) {
perror ( "error in pthread_create" );
exit ( 3 );
}
rc = pthread_join ( thid , ( void * ) & stat );
exit ( 0 );
}
线程和信号 信号的接收:
信号动作(signal action)是进程级的,如果一个默认动作是stop或terminate的信号送达任意一个线程,那么进程中的所有线程都会stop或terminate。 信号处置是进程级的,进程中所有线程对于一个信号共享同样的处置,如果一个线程使用sigaction()为信号创建了信号处理函数,当信号到达时,信号处理函数可能在任一进程中执行。 在以下情况下信号会被发给特定的线程:由于线程执行的硬件指令异常产生的信号(SIGBUS, SIGFPE, SIGILL, and SIGSEGV),只有产生异常的线程收到并处理。 写一个被破坏的管道时产生的SIGPIPE信号。 pthread_kill() or pthread_sigqueue()发送给指定线程。 当信号被发送到一个多线程进程时,内核会任意选择一个线程,把信号发给它,并在那个线程中调用线程处理函数。 signal mask是线程级的,线程的信号掩码继承自创建它的线程,每个线程可以使用pthread_sigmask()单独block或unblock某个信号。 内核为进程维护一个挂起信号表,也为每个线程维护一个挂起信号表,sigpending()返回的线程正在挂起的信号和进程正在挂起的信号的并集。 当信号处理函数打断了pthread_mutex_lock()和pthread_cond_wait()的调用,会自动重新执行调用。 备用信号栈是线程级的。 线程和进程控制 当某一个线程调用exec()后,调用程序会被完全替换掉。线程的特有数据析构函数和清理处理函数都不会被调用。 当多线程程序调用fork()后,只有调用线程会被复制到子进程中。其他线程都会消失,它们的清理函数也不会被调用,这就带来一些问题:除了调用线程,全局变量包括互斥量等也会被复制进子进程,这就导致如果在fork()的时候,其他线程锁了一个互斥量,fork()完毕后,它消失了..那个互斥量就会被永远的锁住。 因为清理函数不会被调用,所以还有可能导致内存泄漏。fork()最好马上调用exec()。如果不能,Pthread提供了pthread_atfork()接口 1
2
3
#include <pthread.h>
int pthread_atfork ( void ( * prepare_func )( void ), void ( * parent_func )( void ), void ( * child_func )( void ));
prepare_func会被加入一个函数列表中,在子进程创建之前,自动按照注册顺序反序执行。parent_func和child_func在fork()返回之前,分别在父进程和子进程中按注册顺序执行。
下面是栗子:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
#define _UNIX03_THREADS 1
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <stdlib.h>
#include <errno.h>
char fn_c [] = "childq.out" ;
char fn_p [] = "parentside.out" ;
int fd_c ;
int fd_p ;
void prep1 ( void ) {
char buff [ 80 ] = "prep1 \n " ;
printf ( "prep1 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void prep2 ( void ) {
char buff [ 80 ] = "prep2 \n " ;
printf ( "prep2 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void prep3 ( void ) {
char buff [ 80 ] = "prep3 \n " ;
printf ( "prep3 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void parent1 ( void ) {
char buff [ 80 ] = "parent1 \n " ;
printf ( "parent1 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void parent2 ( void ) {
char buff [ 80 ] = "parent2 \n " ;
printf ( "parent2 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void parent3 ( void ) {
char buff [ 80 ] = "parent3 \n " ;
printf ( "parent3 \n " );
write ( 4 , buff , sizeof ( buff ));
}
void child1 ( void ) {
char buff [ 80 ] = "child1 \n " ;
printf ( "child1 \n " );
write ( 3 , buff , sizeof ( buff ));
}
void child2 ( void ) {
char buff [ 80 ] = "child2 \n " ;
printf ( "child2 \n " );
write ( 3 , buff , sizeof ( buff ));
}
void child3 ( void ) {
char buff [ 80 ] = "child3 \n " ;
printf ( "child3 \n " );
write ( 3 , buff , sizeof ( buff ));
}
void * thread1 ( void * arg ) {
printf ( "Thread1: Hello from the thread. \n " );
}
int main ( void )
{
pthread_t thid ;
int rc , ret ;
pid_t pid ;
int status ;
char header [ 30 ] = "Called Child Handlers \n " ;
if ( pthread_create ( & thid , NULL , thread1 , NULL ) != 0 ) {
perror ( "pthread_create() error" );
exit ( 3 );
}
if ( pthread_join ( thid , NULL ) != 0 ) {
perror ( "pthread_join() error" );
exit ( 5 );
} else {
printf ( "IPT: pthread_join success! Thread 1 should be finished now. \n " );
printf ( "IPT: Prepare to fork!!! \n " );
}
/*-----------------------------------------*/
/*| Start atfork handler calls in parent */
/*-----------------------------------------*/
/* Register call 1 */
rc = pthread_atfork ( & prep1 , & parent2 , & child3 );
if ( rc != 0 ) {
perror ( "IPT: pthread_atfork() error [Call #1]" );
printf ( " rc= %d, errno: %d" , rc , errno );
}
/* Register call 2 */
rc = pthread_atfork ( & prep2 , & parent3 , & child1 );
if ( rc != 0 ) {
perror ( "IPT: pthread_atfork() error [Call #2]" );
printf ( " rc= %d, errno: %d" , rc , errno );
}
/* Register call 3 */
rc = pthread_atfork ( & prep3 , & parent1 , NULL );
if ( rc != 0 ) {
perror ( "IPT: pthread_atfork() error [Call #3]" );
printf ( " rc= %d, errno: %d" , rc , errno );
}
/* Create output files to expose the execution of fork handlers. */
if (( fd_c = creat ( fn_c , S_IWUSR )) < 0 )
perror ( "creat() error" );
else
printf ( "Created %s and assigned fd= %d \n " , fn_c , fd_c );
if (( ret = write ( fd_c , header , 30 )) == - 1 )
perror ( "write() error" );
else
printf ( "Write() wrote %d bytes in %s \n " , ret , fn_c );
if (( fd_p = creat ( fn_p , S_IWUSR )) < 0 )
perror ( "creat() error" );
else
printf ( "Created %s and assigned fd= %d \n " , fn_p , fd_p );
if (( ret = write ( fd_p , header , 30 )) == - 1 )
perror ( "write() error" );
else
printf ( "Write() wrote %d bytes in %s \n " , ret , fn_p );
pid = fork ();
if ( pid < 0 )
perror ( "IPT: fork() error" );
else {
if ( pid == 0 ) {
printf ( "Child: I am the child! \n " );
printf ( "Child: My PID= %d, parent= %d \n " , ( int ) getpid (),
( int ) getppid ());
exit ( 0 );
} else {
printf ( "Parent: I am the parent! \n " );
printf ( "Parent: My PID= %d, child PID= %d \n " , ( int ) getpid (), ( int ) pid );
if ( wait ( & status ) == - 1 )
perror ( "Parent: wait() error" );
else if ( WIFEXITED ( status ))
printf ( "Child exited with status: %d \n " , WEXITSTATUS ( status ));
else
printf ( "Child did not exit successfully \n " );
close ( fd_c );
close ( fd_p );
}
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
终端输出:
Thread1: Hello from the thread.
IPT: pthread_join success! Thread 1 should be finished now.
IPT: Prepare to fork!!!
Created childq.out and assigned fd= 3
Write() wrote 30 bytes in childq.out
Created parentside.out and assigned fd= 4
Write() wrote 30 bytes in parentside.out
Parent: I am the parent!
Parent: My PID= 42349, child PID= 42351
Child: I am the child!
Child: My PID= 42351, parent= 42349
Child exited with status: 0
文件内容:
$ cat parentside.out
Called Child Handlers
prep3
prep2
prep1
parent2
parent3
parent1
$ cat childq.out
Called Child Handlers
child3
child1
从输出中能看出子进程中调用的处理函数可以通过文件描述符3往childq.out文件写内容,父进程可以通过文件描述符4往parentside.out文件中写内容。根据文件内容可以看出函数执行顺序。